4. robit智能小车案例02:边缘检测¶
4.3. 背景知识¶
寻迹原理¶
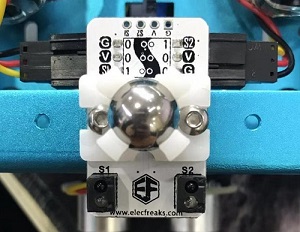
- 该巡迹模块使用的为红外线传感器,模块由一个发射端和一个接收端组成,发射端发射红外线由地面反射回来由接收端接收。
- 遇到黑色地面或者其他吸收红外光材质的物品时,接收端无法接收到红外线,巡迹模块返回1。

双路寻迹模块模块¶
- 两路巡线模块电子积木集成了两组反射式红外对管,可通过它来识别黑线。两个3P带锁杜邦接口和一个4P焊盘,能够直接用两个GVS线连接连接两个3P杜邦接口,接线十分方便。通常应用该模块来做巡线智能小车,我们可以任意设计黑线轨迹,通过编程使小车按我们设计的黑线轨迹行驶。

4.6. 编程¶
步骤 1¶
- 在MakeCode的代码抽屉中点击Advanced,查看更多代码选项。
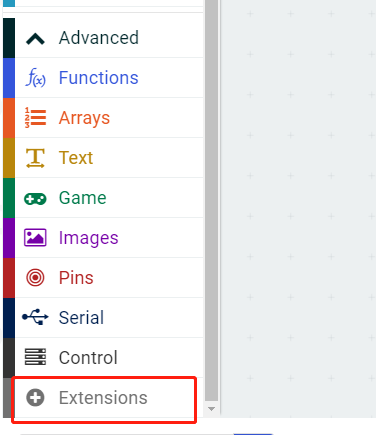
- 为了给robit智能小车编程,我们需要添加一个扩展库。在代码抽屉底部找到“Extension”,并点击它。这时会弹出一个对话框。搜索“robit”,然后点击下载这个代码库。
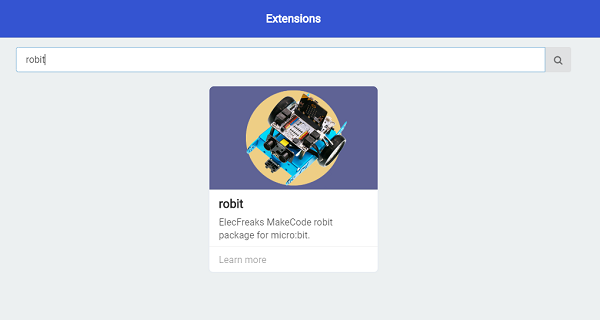
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
步骤 2¶
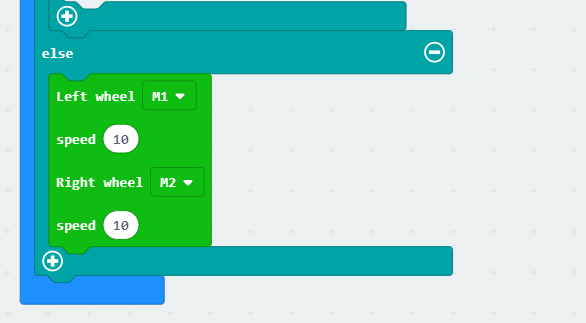
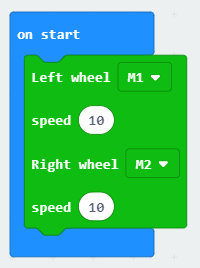
在开机启动时初始化设置左右轮电机到M1,M2端口速度为10。
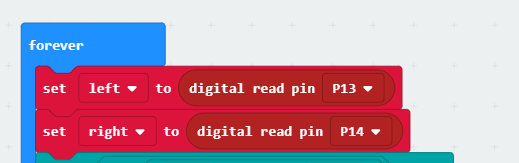
设置左右两个红外线传感器的返回值变量Left和right,读取P13和P14接口的返回参数。
如果左右红外线中至少有一个没收到反馈(检测到边缘),设置左右电机速度为负数倒车。 随机生成一个0到100的数,如果小于50,停止电机M1完成右转向,如果大于50,停止电机M2完成左转向。
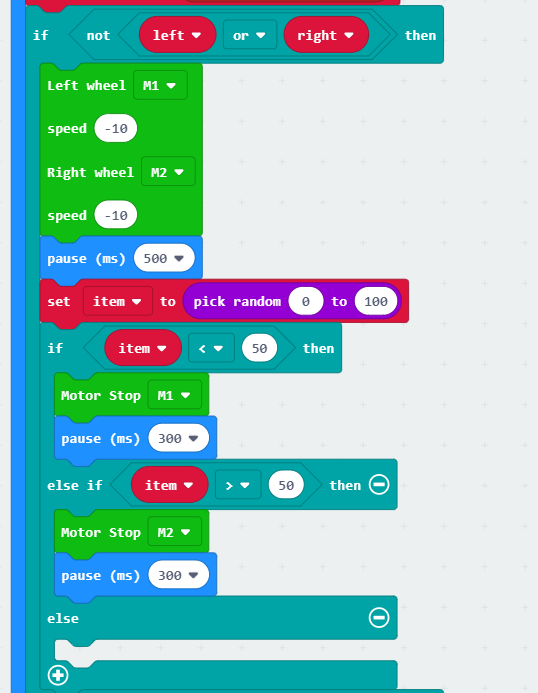
如果左右红外线传感器均未检测到,设置左右电机速度为10继续前进。